Implementing PID Control in PLC Systems
In the intricate dance of industrial automation, precision is paramount, and achieving it is akin to an art form. At the heart of this art lies the Proportional–Integral–Derivative (PID) control—a cornerstone of control systems, ensuring processes run smoothly and efficiently. When integrated with Programmable Logic Controllers (PLCs), PID control becomes an even more powerful tool in the engineer’s repertoire. In this comprehensive exploration, we will delve into the fundamentals of PID control within PLC systems, revel in the benefits it bestows, and navigate the complexities of selecting, setting up, and tuning PID controllers. We’ll also tackle common challenges, share optimization strategies, and bring to light real-world success stories. Whether you are an automation novice or a seasoned professional, this guide is crafted to equip you with the knowledge to master PID control in PLC systems, enabling you to elevate the performance and innovation of your automated solutions.
Understanding PID control in PLC systems
The concept of PID (Proportional-Integral-Derivative) control finds a pivotal place within the domain of industrial automation, where maintaining the accuracy of system parameters is quintessential. These controls are integral in ensuring that variables such as temperature, pressure, or flow remain at their desired set points. By understanding PID control in PLC (Programmable Logic Controller) systems, industrial professionals can vastly improve process efficiency and system responsiveness. Indeed, the tailored implementation of these controllers must be predicated upon a comprehensive grasp of their function and application within the PLC environment.
Engendering a robust PID solution necessitates contending with the three distinctive components—proportional, integral, and derivative—each contributing to the overall control strategy in a unique manner. The proportional component targets the current error, the integral component accounts for the accumulation of past errors, while the derivative component predicts future errors based on the current rate of change. In a PLC system, carefully balancing these elements is critical; excessive focus on one may lead to instability or oscillation, whereas insufficient consideration can result in sluggish response to disturbances.
PLC systems equipped with PID control offer a dynamic and adaptable framework capable of automatic self-correction in real time. This process unfolds through the continuous comparison of the system’s current state with the pre-established set point. Variations are promptly corrected by adjusting control variables through the PID algorithm’s precise mathematical constructs, thereby curtailing the margin of fluctuation and escalating the fidelity of process regulation.
Ultimately, a deep-dive into the mechanics of PID control within PLC systems illuminates the intricate balance of proportional, integral, and derivative actions harmoniously operating to fine-tune the performance. As industries burgeon and seek heightened operational efficiency, delving into the nuances of PID control is not only beneficial but imperative for those aiming to revolutionize their system’s control architecture and achieve unparalleled precision in their automated processes.
Benefits of implementing PID control in PLC systems
The incorporation of PID control within PLC systems is akin to bestowing a meticulous artificer with the instruments requisite for achieving precision. By its very essence, a PID (Proportional, Integral, and Derivative) control algorithm rigorously tinkers with control elements, thereby assuring that the processed output rigorously conforms to the desired setpoint with minimal deviation. It is this relentless pursuit of exactitude which ensures that PID-controlled systems are both efficient and steadfast.
The merits of deploying PID control within a PLC system extend far beyond precision. Such systems enjoy the boon of adaptability; they are well-suited to cope with the variable demands of industrial processes. Whether it be combating disturbances or compensating for long-term drift, the dynamically tuned feedback loop inherent in the PID control system is a bulwark against the myriad of inconsistencies that could potentially besiege production quality and consistency.
Moreover, embedding PID control in PLC systems endows operators with a profound degree of control and insight. Complex industrial processes that were once shrouded in opacity can now be governed with an intricate level of understanding, enabling operators to preemptively adjust parameters in real-time to forestall suboptimal performance. This preemptive capacity not only amplifies productivity but also curtails the wear and tribulations exerted upon machinery, thereby extenuating maintenance requirements and prolonging equipment lifespan.
Lastly, with the advent of advanced PID control algorithms coalesced into PLC systems, energy conservation and resource management have taken a substantial leap forward. The enhanced control precision allows for the meticulous use of resources, ensuring that energy is not squandered and materials are utilized with utmost efficiency. Hence, PID control contributes indispensably to the overarching goal of sustainable industrial operation and economic prudence, cementing its status as an invaluable asset in modern automation and control systems.
Key components of a PID control system
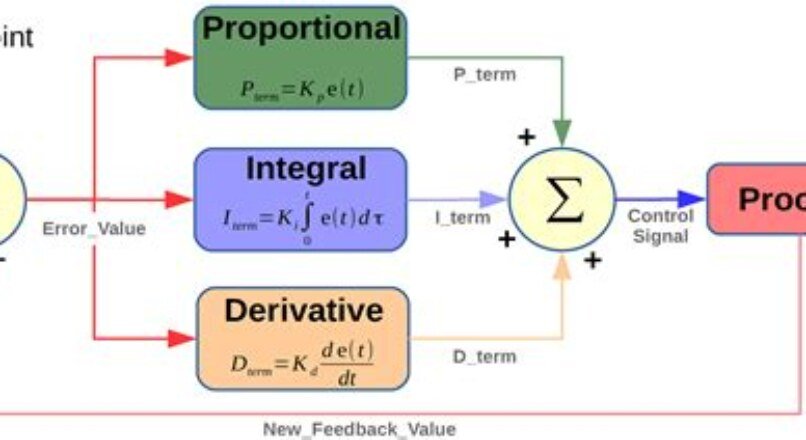
The architecture of a PID control system is constructed around its three principal elements: the Proportional, the Integral, and the Derivative components, each contributing distinct dynamics to the system’s overall behavior. The Proportional component’s primary function is to generate a control signal that is directly proportional to the current error value, a measure of the deviation between the desired setpoint and the actual process variable. This immediate and responsive adjustment is critical in reducing the magnitude of the error, with the controller’s sensitivity tuned by adjusting the Proportional gain.
Delving deeper, the Integral component of the PID controller plays a pivotal role in systematically accumulating historical error values over time, thus enabling the system to confront and correct any persistent or ongoing discrepancies that the Proportional element alone might leave unaddressed. This cumulative action helps eliminate the residual steady-state error, ensuring the process variable reaches and stays at the setpoint with increased precision, the efficacy of which is governed by the Integral gain setting.
In a synergistic fashion, the Derivative segment of the PID control system introduces a predictive aspect to the control equation by focusing on the error’s rate of change. Essentially, it provides a damping effect, preempting the system’s response to future errors based upon their current trajectory, thereby contributing to a reduction in overshoot and enhancing the system’s stability. This anticipatory feedback, modulated by the Derivative gain, significantly improves the overall response of the PID controller and the agility with which it can achieve and maintain the desired process conditions.
Finally, the seamless interplay and proper calibration of these core elements are crucial in sculpting a robust and effective PID control system. Mastery over the subtleties in configuring the Proportional, Integral, and Derivative gains is indispensable for achieving an optimal balance between responsiveness and stability within a PLC system, reflecting the true essence and sophistication of PID control in complex automation and process management scenarios.
Selecting the right PID controller for your PLC system
When looking to ensure the precise regulation of variables within industrial control systems, it is essential to select the right PID controller for your Programmable Logic Controller (PLC) system. The PID controller must be capable of maintaining process control and stability, which requires a deep understanding of the dynamic behavior and characteristics of the system in question. To determine the most suitable controller, it is critical to consider factors such as response time, control precision requirements, and the specific application constraints that the system must operate within.
Additionally, when selecting a PID controller, the integration compatibility with the existing PLC system cannot be overstated. The right controller should seamlessly communicate with the PLC, enabling smooth data interchange and allowing for efficient modification and feedback in the control loop. It’s also crucial to evaluate the I/O capacity, the types of inputs and outputs available, and whether the PID controller can support the number of sensor and actuator interfaces required by the application.
Another important consideration when selecting a PID controller for a PLC system is the ease of use from the perspective of the end-user. A user-friendly interface, with easy-to-configure parameters and clear monitoring capabilities, will significantly aid in the deployment and ongoing maintenance of the PID control loop. Having access to robust diagnostic tools and support is also valuable to effectively troubleshoot and refine the system’s performance over time.
Lastly, understanding the long-term reliability and environmental conditions that the PID controller will be subjected to can inform the selection process. The PID controller should be rugged enough to withstand the operational environment, from temperature extremes to vibrational forces, which are common in industrial settings, ensuring long-term dependable control. Manufacturers often provide specifications and ratings such as temperature range and shock resistance, which are essential in verifying whether a controller is suited for the application’s physical demands.
Setting up the PID control loop in a PLC system
Setting up the PID control loop in a PLC system is a sophisticated process that necessitates a deep understanding of both the system’s dynamics and the operational goals to ensure precise control and optimal performance. The first step in the implementation involves establishing a clear link between the PLC and the process variables, such as temperature, pressure, or flow rate, which are continuously measured by sensors and relayed back to the PLC. This real-time data is the lifeblood of the PID control loop, serving as the primary input for the control algorithm.
Next, it is imperative to accurately configure the PID parameters – the proportion, integral, and derivative settings – which form the backbone of the control strategy. Meticulous attention to setting these parameters cannot be overstated, as they determine how aggressively the PID controller reacts to deviations from the setpoint. For instance, a higher proportional gain can lead to a faster response to errors but may introduce an increased risk of overshoot and oscillations without careful calibration of the integral and derivative terms.
Furthermore, implementing robust fail-safes and safety protocols within the PID loop is essential to safeguard both the PLC system and the process it controls. These protocols are integral to preventing systemic operational errors and ensuring that the process returns to a safe state in the event of sensor malfunctions, communication interruptions, or any unexpected disturbances. Such considerations are critical for maintaining system integrity and avoiding costly downtime or damage.
Finally, conducting a thorough and methodical PID loop tuning procedure is crucial to fine-tune the system’s response. It often involves using either manual tuning methods or software-based optimization tools. The loop tuning process fine-tunes how the PID controller interacts with the specific characteristics of the system, addressing the unique response behaviors and non-linearities that may be present, thereby ensuring that the PLC can maintain a stable and desired level of control over the process variables.
Tuning the PID controller for optimal performance
Initiating the tuning process for a PID controller within a PLC system requires a deep understanding of the dynamic responses from the control elements and the system as a whole. Delicate adjustments to the proportional, integral, and derivative parameters are necessary to refine the performance, ensuring the controller accurately responds to setpoint changes and maintains process variables within desired limits. Successfully tuned PID controllers will demonstrate minimal overshoot, quick settling times, and steady error minimization.
The first step in tuning a PID controller often involves setting the integral and derivative terms to zero, thereby transforming the controller into a purely proportional controller. This simplification allows for the observation of system behavior under a single variable influence, giving a baseline from which to incrementally adjust the proportionality to a point where the process variable reaches its target with stable oscillation characteristics that are neither too wide in amplitude nor too frequent in occurrence.
Once a stable proportional gain has been established, the integral term can be carefully introduced to address any steady-state error that the proportional-only controller cannot eliminate. Incremental adjustments to the integral term can significantly enhance the performance of the PID controller by systematically reducing the offset between the desired setpoint and the actual process variable over time, ensuring that the system converges towards equilibrium with greater precision without inducing instability.
The derivative term requires cautious application, serving as a predictive mechanism that can anticipate future process variable behavior based on its current rate of change. When correctly adjusted, the derivative term provides an extra layer of control that dampens the system’s tendency to oscillate and expedites its return to the setpoint. However, improper tuning of this component could introduce noise amplification and exacerbated system instability, which underpins the crucial necessity of methodical experimentation and analysis for optimal PID controller performance within a PLC system.
Methods for optimizing PID control in PLC systems
Optimizing PID control in PLC systems is essential for enhancing system performance and ensuring that processes run smoothly and efficiently. One effective method for optimization is to implement an adaptive PID algorithm, which can adjust to changes in the process parameters in real-time, compensating for disturbances and deviations without manual intervention, thereby improving the responsiveness and accuracy of the control loop.
Another key strategy to optimize PID control in PLC systems is through the use of simulation and modeling tools. By creating a digital twin of the control system, engineers can test various PID settings and scenarios in a virtual environment. This practice allows for the adjustment and fine-tuning of the PID parameters, such as the proportional, integral, and derivative gains, under different operating conditions before applying these changes to the actual system, minimizing the risk of instability or performance issues.
Furthermore, data analytics and machine learning techniques are becoming increasingly valuable in the arena of PID optimization. By analyzing historical and real-time operational data, it’s possible to identify patterns and predict the optimal PID parameters for varying process dynamics. Such sophisticated tools can provide recommendations for parameter adjustments based on predictive models, thereby enabling PLC systems to operate at their peak performance over a broader range of conditions.
Lastly, a collaborative approach involving cross-disciplinary teams—combining insights from process engineers, control system specialists, and data scientists—can unveil innovative methods for optimizing PID control in PLC systems. Collaboration fosters a holistic view of system behavior, leading to a more comprehensive optimization strategy that covers various aspects, including hardware selection, software algorithms, and feedback loop configuration, all aimed at realizing the full potential of PID control in industrial applications.
Common challenges and troubleshooting in PID control implementations
Proportional-Integral-Derivative (PID) controllers are sophisticated instruments in modern automation systems, and implementing them within Programmable Logic Controllers (PLCs) can be a challenging task. Professionals in the field often confront difficulties such as stabilizing the PID loop, dealing with overshooting or undershooting of target values, and handling variable process loads which, without doubt, require a solid understanding of both the system dynamics and the PID control algorithm itself to effectively troubleshoot.
One frequent challenge is the proper tuning of PID parameters: the proportional gain (Kp), integral time (Ti), and derivative time (Td). If these parameters are not correctly set, the system may become unstable, exhibit persistent oscillations, or react too slowly to changes in process variables. Tuning requires a methodical approach, often employing techniques such as the Ziegler-Nichols method or software-based simulation tools which enable the engineers to predict system behavior and adjust the parameters for optimal performance.
Another common issue is coping with nonlinearities in the system or the presence of external disturbances, both of which can drastically affect the performance of a PID controller. These issues necessitate a deeper look into the robustness of the PID design and might lead to the use of advanced strategies like gain scheduling or incorporating filters to mitigate the effects of such disturbances. Additionally, it might compel the need to revise the system’s design or adding other control strategies to work in tandem with the PID controller.
Sometimes, the challenges might not lie within the PID control itself but in the interfacing with other PLC system functionalities or hardware issues such as sensor inaccuracies or actuator performance inconsistencies. In such cases, thorough system checks, verification of input and output signals, and calibration of measurement devices are indispensable steps in the troubleshooting process. Indeed, understanding each component’s role and behavior within the loop is critical in navigating through the common pitfalls one might encounter during PID control implementations in PLC systems.
Integration of PID control with other PLC system functionalities
In the realm of industrial automation, the seamless integration of PID control with other PLC system functionalities is paramount for achieving sophisticated and dynamic process control. As a cornerstone for maintaining desired process levels, the combination of PID algorithms with PLC logic surfaces as an essential strategy for enhancing system responsiveness and reliability. By intertwining PID control, PLC systems gain the flexibility to autonomously adjust process parameters in real time, thereby ensuring operational precision and minimizing the risk of process deviation.
To fully harness the potent synergy between PID control and other PLC components, engineers must judiciously design the PLC architecture. This typically entails the strategic placement of sensors and actuators, ensuring that the data relayed to the PID controller is both accurate and timely, thereby fostering a control loop that is impeccably attuned to the intricacies of the process it governs. Moreover, embedding PID control within PLCs allows for a condensed footprint and a reduction in overall system complexity since it leverages the inherent processing power of the PLC for multiple control tasks.
Furthermore, the PID controller can be programmed to work in tandem with additional PLC modules, such as those responsible for motion control or machine safety. This unified approach facilitates the orchestration of multiple control strategies, whereby the PID controller might adjust a valve position while another part of the PLC oversees the speed of a conveyor belt. Such a harmonized control mechanism not only bolsters system efficacy but also intricately links disparate functional units, enabling a cohesive operation that can adapt to varying process demands with alacrity and finesse.
Lastly, the advantages of integrating PID control with other PLC system functionalities extend into the realm of diagnostics and maintenance. PLCs equipped with integrated PID control capabilities can provide comprehensive feedback and historical data logs, which are instrumental for predictive maintenance and troubleshooting. This concordance between control and analytic faculties equips plant operators with the vital tools for preempting potential issues and fine-tuning processes, thereby ensuring uninterrupted production and the sustained integrity of the entire automation framework.
Real-world applications and success stories of PID control in PLC systems
The implementation of PID control within PLC systems has revolutionized various industries by significantly improving process efficiency and precision. One notable real-world application is in the manufacturing sector where PID control is employed to regulate the temperature during the production of sensitive electronic components. By continuously adjusting the heating elements based on feedback, manufacturers are able to maintain the optimal temperature, reducing the occurrence of defects and enhancing product quality. The success of this application is measurable not only by the increase in yield but also by the reputation of manufacturing firms for producing high-grade electronics.
In the realm of pharmaceuticals, precise environmental conditions are paramount. Here, PID control systems have made a substantial impact by managing the humidity and temperature inside storage facilities, preserving the integrity of critical drugs and vaccines. Automated adjustments ensure that variations are quickly corrected, maintaining an environment that meets the stringent requirements of the pharmaceutical industry. The successful application of PID control in these contexts underscores its ability to adapt to industries where the cost of failure is incredibly high and where reliability is non-negotiable.
Optimizing PID control has also been crucial for the food and beverage industry, particularly in the dairy sector where pasteurization processes need to be carefully controlled. The precise temperature control afforded by PID implemented in PLC systems ensures that pathogens are eliminated without negatively affecting the quality and taste of the milk. Dairy plants that integrate PID control systems often report not only better product consistency but also notable increases in energy efficiency, illustrating how PID control can be a lynchpin for both product and operational improvements.
Environmentally, PID control systems in PLC configurations have played a significant role in water treatment facilities. The control of pumps and valves to manage the flow of water and treatment chemicals is done with astonishing precision, thus ensuring that water quality complies with the health and safety standards required by law. Case studies from urban water treatment plants have highlighted the implementation of PID control as a transformative step towards achieving more sustainable and responsible water management practices. These real-world examples serve as compelling illustrations of how PID control in PLC systems is not only about improving business outcomes but also about contributing positively to society at large.
Frequently Asked Questions
What is PID control, and how is it used in PLC systems?
PID control stands for Proportional-Integral-Derivative control, and it’s used in PLC (Programmable Logic Controller) systems to maintain a desired setpoint by adjusting the process control inputs. It utilizes a feedback loop to correct the error between a measured process variable and a desired setpoint.
What are the primary benefits of using PID control in PLC systems?
The benefits of integrating PID control into PLC systems include improved stability, reduced oscillations in the controlled variable, and enhanced precision in achieving and maintaining the process setpoint. This leads to increased efficiency, better product quality, and often energy savings.
Can you outline the key components of a PID control system?
A typical PID control system includes a sensor to measure the process variable, a controller to compute the control action needed, and an actuator to implement the controller’s decision. In a PLC system, the PID algorithm is often run by the PLC itself, which acts as the controller.
How does one go about selecting the right PID controller for a PLC system?
Selecting the right PID controller for a PLC system involves considering factors such as the dynamic characteristics of the process to be controlled, the performance requirements, the ease of configuring and maintaining the controller, and the level of support provided by the manufacturer.
What are the steps involved in setting up a PID control loop within a PLC system?
Setting up a PID control loop in a PLC system typically involves configuring input and output channels, selecting appropriate PID parameters, programming the PID algorithm into the PLC, and connecting the hardware components such as sensors and actuators.
How do you tune a PID controller to ensure optimal performance?
Tuning a PID controller involves adjusting the proportional, integral, and derivative gains to achieve the desired control response. Common tuning methods include manual trial and error, using established heuristic tuning rules such as the Ziegler-Nichols method, or employing software-based optimization tools.
What are some common issues that might arise during PID control implementation and how can they be addressed?
Common challenges in PID control implementations include overshoot, steady-state error, and slow response time. These can be addressed by properly tuning the PID parameters, implementing filters to reduce noise, adjusting control loop sampling times, or integrating feedforward control strategies if necessary.